В 1997 году между ООО «Энергоавтоматика» и ОАО «Сибнефтепровод» был заключён договор, который предусматривал внедрение первой в России СОУ по волне давления. Система должна была обеспечивать контроль подводных переходов на нефтепроводах НКК, УБКУА. Для её реализации были установлены дополнительные датчики давления, не связанные с имевшейся на трубопроводах системой телемеханики. В качестве контроллеров сбора данных с датчиков были выбраны программируемые логические контроллеры (ПЛК) Smart I/O производства PEP Modular Computers (в настоящее время входит в состав холдинга Kontron).
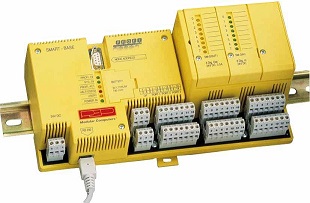
Контроллер Smart I/O, 1997 год
Контроллер Smart I/O состоял из базового блока Smart-Base и набора модулей расширения. Базовый блок Smart-Base был реализован на процессоре Motorola MC68302 20 МГц с ОЗУ 256 кб и управлялся операционной системой OS-9. Было реализовано прикладное программное обеспечение, обеспечивавшее алгоритм обнаружения волны давления, которое вместе с операционной системой прошивалось на ПЗУ типа EPROM. Аналоговые сигналы обрабатывались модулем расширения SM-ADC1, представлявшим собой 12-разрядный 6-канальный АЦП с частотой оцифровки 100 Гц. Вся математическая обработка сигналов осуществлялась на контроллерах. При обнаружении волны давления программное обеспечение формировало блоки регистров протокола Modbus RTU, которые передавались через контроллер телемеханики Миконт (производства ООО «НПА «Вира РеалТайм», г. Москва) на верхний уровень. Программным обеспечением верхнего уровня анализировались поступающие волны давления и принималось решение о наличие в трубопроводе утечки. Синхронизация времени контроллеров СОУ так же осуществлялась от контроллера телемеханики. Контроллерами СОУ данного типа были оснащены подводные переходы через реки Тура и Иртыш.
В1998-1999 годах в ОАО «Северные МН» была установлена система обнаружения утечек по волне давления для подводных переходов. Здесь в качестве контроллеров СОУ были использованы модули аналогового ввода ТА 222, имеюшиеся в составе штатных контроллеров телемеханики ЭЛСИ-Т (производства ЗАО «ЭлеСи», г. Томск).
В1998-1999 годах в ОАО «Северные МН» была установлена система обнаружения утечек по волне давления для подводных переходов. Здесь в качестве контроллеров СОУ были использованы модули аналогового ввода ТА 222, имеюшиеся в составе штатных контроллеров телемеханики ЭЛСИ-Т (производства ЗАО «ЭлеСи», г. Томск).

Модуль аналогового ввода ТА 222, 1999 год
Модуль ТА 222 имел в своем составе 12-разрядную плату АЦП (один разряд знаковый) с 4-мя гальванически разделенными каналами и временем преобразования одного канала 10 мкс (плата МА-213), а также интеллектуальную плату с процессором Intel 80C188 (плата ТД-002), предоставляющую расширенные возможности по предварительной обработке сигналов. Программное обеспечение с алгоритмом по волне давления работало на модуле ТА 222 без операционной системы и прошивалось на ПЗУ типа EPROM. При обнаружении волны давления формировался блок данных (впоследствии названный «неформатный кадр»), который передавался по шине контроллера через модули ТС 203 (центральный процессор) и ТН 203 (модем V23/V27) на верхний уровень. В рамках данного проекта с использованием ТА222 были оснащены системой обнаружения утечек подводные переходы через реки Чикшина, Печора, Уса. Кроме этого, позднее, с использованием в качестве контроллера СОУ модуля ТА222, были оснащены системой обнаружения утечек и другие объекты в ОАО «МН Дружба», ОАО «Транссибнефть» и др.
Практика использования этих двух типов контроллеров показала, что для эффективного решения задач СОУ волновыми алгоритмами недостаточно 12-разрядного АЦП для обработки сигнала. Поэтому следующим этапом истории применения контроллеров для решения задач обнаружения утечек по волне давления поиск технического решения с использованием 16-разряднго АЦП и более производительного процессора.
В результате анализа имевшихся в 2000-2001 гг. на рынке промышленной автоматизации технических решений, было решено использовать оборудование конструктива PC/104. Преимуществом этого решения на тот момент являлась полная совместимость устройств этого стандарта с персональными компьютерами, а также наличие целого ряда плат 16-разрядных АЦП от различных производителей. В качестве центрального процессора была выбрана плата Octagon 2133 производства Octagon Systems, а в качестве АЦП – плата DMM-16-AT производства Diamond Systems. Под новую аппаратную платформу было полностью обновлено прикладное программное обеспечение. Комбинация плат Octagon 2133 - DMM-16-AT устанавливалась в стандартный для формата PC/104 алюминиевый корпус типа «CanTainer», на лицевую панель выводились все необходимые интерфейсные разъёмы.
Практика использования этих двух типов контроллеров показала, что для эффективного решения задач СОУ волновыми алгоритмами недостаточно 12-разрядного АЦП для обработки сигнала. Поэтому следующим этапом истории применения контроллеров для решения задач обнаружения утечек по волне давления поиск технического решения с использованием 16-разряднго АЦП и более производительного процессора.
В результате анализа имевшихся в 2000-2001 гг. на рынке промышленной автоматизации технических решений, было решено использовать оборудование конструктива PC/104. Преимуществом этого решения на тот момент являлась полная совместимость устройств этого стандарта с персональными компьютерами, а также наличие целого ряда плат 16-разрядных АЦП от различных производителей. В качестве центрального процессора была выбрана плата Octagon 2133 производства Octagon Systems, а в качестве АЦП – плата DMM-16-AT производства Diamond Systems. Под новую аппаратную платформу было полностью обновлено прикладное программное обеспечение. Комбинация плат Octagon 2133 - DMM-16-AT устанавливалась в стандартный для формата PC/104 алюминиевый корпус типа «CanTainer», на лицевую панель выводились все необходимые интерфейсные разъёмы.

Контроллер СОУ на базе Octagon в корпусе CanTainer, 2001 год
Основные характеристики были следующие: процессор AMD 5х86 133 МГц с ОЗУ 4 МБ, операционная система MS DOS 6.22, DiskOnChip 32 МБ. Вся обработка сигналов алгоритмами по-прежнему велась в контроллере и в качестве протокола передачи данных на верхний уровень по прежнему использовался Modbus RTU. Обновление ПО производилось с помощью подключаемого к контроллеру FDD-дисковода. Для синхронизации времени стали использоваться GPS-антенны, подключаемые через RS-232 по протоколу NMEA к последовательному порту. Первые системы с использованием таких контроллеров СОУ были уставлены АО «Мажейкю Нафта», Литва. В дальнейшем эти контроллеры были поставлены на объекты ОАО «Верхневолжскнефтепровод», ОАО «Приволжскнефтепровод», ЗАО «Ачимгаз» и др. Их использование во вновь внедряемых системах продолжалось до 2008 года.
В конце 2003 года между ООО «Энергоавтоматика» и ЗАО «ЭлеСи» было согласовано техническое задание на разработку нового модуля быстродействующего АЦП для контроллера ЭлСи-Т. Результатом разработки явился модуль ТА 216, опытные образцы которого прошли испытания на объектах МН «Дружба» в июне 2004 года. Первая протяжённая СОУ по волне давления с использованием модуля ТА 216 была установлена на МН «Тихорецк-Туапсе» ОАО «Черномортранснефть» в конце 2004 года.
В конце 2003 года между ООО «Энергоавтоматика» и ЗАО «ЭлеСи» было согласовано техническое задание на разработку нового модуля быстродействующего АЦП для контроллера ЭлСи-Т. Результатом разработки явился модуль ТА 216, опытные образцы которого прошли испытания на объектах МН «Дружба» в июне 2004 года. Первая протяжённая СОУ по волне давления с использованием модуля ТА 216 была установлена на МН «Тихорецк-Туапсе» ОАО «Черномортранснефть» в конце 2004 года.

Модуль аналогового ввода ТА 216, 2004 год
Структурно модуль ТА 216 был похож на предыдущий модуль ТА 222. Расширились только технические возможности: АЦП стал 8-канальным и 16 разрядным, а вместо интеллектуальной платы ТД-002 была установлена полноценная процессорная плата формата PC/104 Lippert 802-0002-00 производства LiPPERT (в настоящее время входит в состав компании ADLINK) с процессором серии AMD Geode 75 МГц. Программное обеспечение СОУ получило очередную адаптацию под данную аппаратную платформу и операционную систему MS DOS 6.22. Обмен с верхним уровнем осуществлялся неформатными кадрами по шине контроллера через модуль ТС309, синхронизация осуществлялась также от модуля ТС309. Удобной в работе оказалась установка в ТА 216 в качестве основного накопителя карты памяти типа Compact Flash.
В 2007 году модуль ТА 216 получил дальнейшее своё дальнейшее развитие в виде модуля ТА 516, т.к. полностью обновился весь контроллер телемеханики ЭлСи-Т, который стал называться ЭлСи-ТМ. У модуля ТА 516 появился новый 18-разрядный АЦП и более производительная процессорная плата Advantech PCM-3350 производства Advantech.
В 2007 году модуль ТА 216 получил дальнейшее своё дальнейшее развитие в виде модуля ТА 516, т.к. полностью обновился весь контроллер телемеханики ЭлСи-Т, который стал называться ЭлСи-ТМ. У модуля ТА 516 появился новый 18-разрядный АЦП и более производительная процессорная плата Advantech PCM-3350 производства Advantech.

Модуль аналогового ввода ТА 516, 2007 год
С началом работ по проектированию СОУ для трубопроводной системы ВСТО в начале 2007 года были приняты новые принципиальные решения для построения всей системы целиком и, как следствие, изменились требования по части контроллеров СОУ. С программного обеспечения контроллеров была снята задача по алгоритмической части, а главной задачей остался сбор информации по измерительным каналам, формирование файлов с данными измерений с привязкой к временной шкале GPS/GLONASS. В качестве протокола передачи файлов был выбран FTP.
Для решения поставленной задачи был выбран одноплатный компьютер Athena формата PC/104 производства Diamond Systems. Его отличительной особенностью было наличие интегрированного 16-разрядного АЦП (по характеристикам такого же, как у платы DMM-16-AT), а так же широкого набора интерфейсов, в том числе Ethernet. Частота установленного на Athena процессора VIA составляла 400 МГц, имелся флеш-диск 128 Мб. Новое программное обеспечение было разработано под операционную систему на базе Linux.
Для решения поставленной задачи был выбран одноплатный компьютер Athena формата PC/104 производства Diamond Systems. Его отличительной особенностью было наличие интегрированного 16-разрядного АЦП (по характеристикам такого же, как у платы DMM-16-AT), а так же широкого набора интерфейсов, в том числе Ethernet. Частота установленного на Athena процессора VIA составляла 400 МГц, имелся флеш-диск 128 Мб. Новое программное обеспечение было разработано под операционную систему на базе Linux.
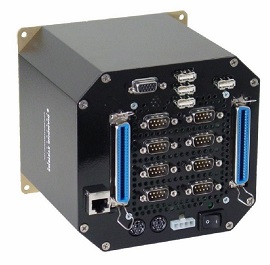
Контроллер СОУ на базе Athena в корпусе Pandora, 2007 год
Первая СОУ с применением этих контроллеров была установлена на Варандейском нефтеотгрузочном терминале ОАО «Лукойл» в Баренцевом море и была сдана в эксплуатацию в конце 2008 года, еще до начала пуско-наладочных работ на ВСТО.
В 2008 контроллер прошёл процедуру утверждения типа средства измерения и был внесён в Государственный реестр средств измерений (ГРСИ) под обозначением «Контроллер системы обнаружения утечек LDS-AT», регистрационный номер 39797-08.
Как альтернатива техническому решению Diamond Systems, в 2010 году была разработана новая модификация контроллера LDS-AT с двумя портами Ethernet. В качестве вычислителя была использована процессорная плата CPC-304, а в качестве АЦП – плата DMM-16-AT производства Diamond Systems. Конструктивный формат – PC/104.
В 2008 контроллер прошёл процедуру утверждения типа средства измерения и был внесён в Государственный реестр средств измерений (ГРСИ) под обозначением «Контроллер системы обнаружения утечек LDS-AT», регистрационный номер 39797-08.
Как альтернатива техническому решению Diamond Systems, в 2010 году была разработана новая модификация контроллера LDS-AT с двумя портами Ethernet. В качестве вычислителя была использована процессорная плата CPC-304, а в качестве АЦП – плата DMM-16-AT производства Diamond Systems. Конструктивный формат – PC/104.

Контроллер LDS-AT, 2010 год
В части программного обеспечения были проведены небольшие доработки, но основа осталась как и у Athena – файловый обмен по FTP, ОС Linux. Основное отличие от Athena – наличие двух портов Ethernet, позволяющих организовать передачу файлов по FTP через основной и резервный каналы. Такими контроллерами СОУ оснащена трубопроводная система БТС-2.
В настоящее время используется модернизированная версия контроллера LDS-AT, разработанная в 2013 году.
ИсточникВ настоящее время используется модернизированная версия контроллера LDS-AT, разработанная в 2013 году.